Il existe actuellement un test assez célèbre dans le domaine de l'IA appelé test de Turing, lequel tente de discerner les comportements intelligents de ceux qui ne le sont pas.
Imaginé en 1950 par Alan Turing, considéré aujourd'hui comme un piller majeur de l'IA, il répondit à l'attente des spécialistes de l'époque qui dès l'apparition de l'intelligence artificielle se sont demandés comment il serait possible, un jour, de déclarer avec certitude qu’un programme est intelligent.
Présentons ici la façon qui, selon lui, pourrait distinguer une machine intelligente d’une machine qui ne l’est pas :
Le fonctionnement de son test est assez simple. Il s'agit concrètement de confronter un homme à une machine par l'intermédiaire de terminaux « anonymes ». L'humain dans une pièce A doit poser des questions respectivement aux 2 autres individus isolés dans deux autres pièces B et C. L'un étant subtilement une machine (B) tandis que l'autre un humain (C). Les questions/réponses sont acheminées et une conversation s'établit au bout de laquelle, l'humain doit finalement déterminer avec certitude quelles réponses proviennent de la machine. S’il en est incapable, la machine a passé le test et peut être considérée comme intelligente.
Note : les questions/réponses sont formulées par écrit, l'imitation vocale de la part de la machine n'est pas nécessaire.
Note 2 : aujourd'hui encore aucun chatterbot (littéralement robot de discussion) n'a réussi à passer le test avec succès !
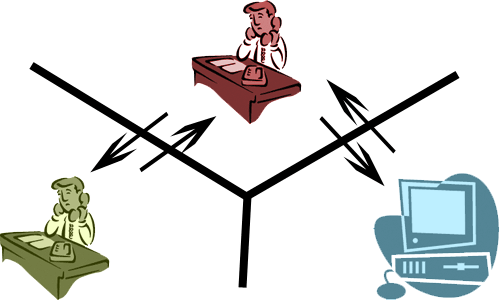
Le test de Turing : une personne doit déterminer lequel de ses deux interlocuteurs est la machine !
Ce test révèle néanmoins certaines faiblesses : peut-on évaluer l'intelligence seulement en jugeant la communication et la cohérence comportementale ?
Plus grave, le test est basé sur l'hypothèse que les êtres humains sont aptes à juger de l'intelligence d'une machine en comparant son comportement avec le comportement humain alors que certains comportements intelligents ne sont pas humains ! En effet, si la machine est plus intelligente qu'un être humain, il lui faudra alors, pour passer le test, délibérément éviter de paraître trop intelligente car si elle était capable de résoudre un problème de calcul qui serait impossible pour un humain, l’examinateur saurait que le programme n'est pas humain et la machine ne satisferait pas au test.
Le test de Turing ne vérifie pas la présence, ou l'absence, d'un comportement intelligent, tel que la capacité de résoudre des problèmes difficiles ou de trouver des idées originales. En fait, le programme communiquant pourrait donner des réponses en apparences intelligentes sans toutefois comprendre ses propres réponses.
Pour ces raisons et d'autres considérations, certains chercheurs en intelligence artificielle ont mis en doute l'utilité de l'essai. Selon eux, la machine doit non seulement donner des bonnes réponses mais comprendre ce qu’elle répond. Ce qui présente un défi encore plus important pour les chercheurs en intelligence artificielle.
La limite entre un programme conventionnel et un programme intelligent reste donc difficile à déterminer. Il est possible que cette question relève d’avantage de la philosophie que de la science.
Et en inédit, pour vous, voici le déroulement d'un véritable test de Turing :
Personnellement je me serais laissé piéger... si je n'avais pas vu la réponse avant de voire le teste... Hum, çà donne à réfléchir.
Source : http://www.conishiwa.org/zones/projets/ia/turing.htm
«
Certaines machines passant le teste "mentent" avec naturel lorsqu'on leur pose des questions concernant leur apparence physique, d'autres parviennent à "faire semblant" de se tromper si on leur soumet un calcul un peu complexe, ou mieux, elles sèment le doute, notamment en prolongeant "artificiellement" leur temps de recherche.
Voici, un exemple de test de Turing. Après l'avoir lu, essayez de répondre si c'est un être humain ou une I.A
| Test : A qui avez-vous affaire ?
| |||
»
Alors, est-ce que cette entité est une intelligence artificielle ?
Je vous laisse relire encore une fois... Avant de vous donner la réponse :
(Si vous vouliez un indice, j'ai dit plus haut que : « aujourd'hui encore aucun chatterbot (littéralement robot de discussion) n'a réussi à passer le teste avec succès ! »...)
Dur-dur, ses réponses sont vraiment subtiles... Toutefois, l'examinateur qui a trouvé la bonne réponse a donné la justification suivante :
« L'entité ne fait jamais appel à une espèce de 'bon sens' ni à la vie quotidienne.
Les réponses qu'elle donne ne nécessitent pas une vraie compréhension des questions. Elle repère les questions (elles se terminent par un point d'interrogation ) et les ordres (le mode impératif).
Enfin, dans l'interrogation sur le poème, elle refuse les substitutions proposées par l'examinateur avec des réponses passe-partout qui ne supposent pas une vraie compréhension du sens. »
L'entité était donc bien une machine, bluffant n'est-ce-pas ?