

Comme exemple pratique, voici un article consacré tout spécialement à l'histoire de la robotique, domaine ou l'intelligence artificielle a eu ses prémisses.
Nous avons ensuite choisi de présenter le robot Puma de General Motors, l'un des tout premier de l'histoire industrielle ! Son fonctionnement vous sera décortiqué afin de clore par un exemple pratique cette première partie (cette partie est donc une vision technique de l'intelligence artificielle : comment autrement que par un terminal, un robot peut-il interagir avec son environnement).
Pour ceux que ça intéresseraient, voici la principale différence entre un automate et unrobot:
Un automate est une machine programmée pour effectuer une tâche précise dans un environnement donné :
- métier à tisser
- imprimante
Un robot est un automate doté de capteurs et d'actionneurs lui donnant une capacité d'adaptation et de déplacement proche de l'autonomie.
- robot aspirateur
- avion ou hélicoptère drone de reconnaissance ou de combat
Dans les années 40, l’ère des ordinateurs modernes commença avec les grands développements dès la Seconde Guerre Mondiale. Les circuits électroniques, tubes à vide,condensateurs et relais remplacèrent leurs équivalents mécaniques et le calcul numérique remplaça le calcul analogique. Les ordinateurs conçus à cette époque forment la première génération d’ordinateurs.
En 1947 suite aux travaux sur les semi-conducteurs, le transistor a été inventé par les Américains John Bardeen, William Sholckley et Walter Brattain, des chercheurs de la compagnie Bell Téléphone. Le transistor est un composant électronique utilisé principalement comme interrupteur et pour l’amplification mais aussi pour stabiliser une tension, moduler un signal ainsi que de nombreuses autres utilisations.
C’est suite aux développements de l’ordinateur, permettant de pouvoir utiliser des langages informatiques et aussi grâce à l’invention du transistor durant les années 40 que Georges DEVOL a pu réaliser son brevet sur la robotique en 1954.
Ce brevet est très important dans le monde de la robotique car il symbolise un des aboutissements majeur dans ce domaine. C'est à cette date précise que la robotique a vu le jour.
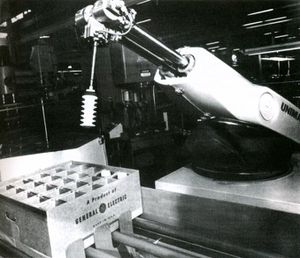
Dans ce brevet Devol a conçu un robot qu’il a intitulé Unimate, dès lors il chercha une compagnie qui pourrait lui financer les développements de ses systèmes. Mis en relation avec Joseph Engelberger, ce dernier était très intéressé par le brevet de Devol et en 1961 Devol accepta de lui vendre sa compagnie UNIMATION ainsi que son brevet plus quelques futurs brevets du même domaine.
Devol et Engelberger se sont associés et c’est dans la même année que le premier Unimate fut utilisé dans les usines de GENERAL MOTORS.

General Motors est une entreprise multinationale américaine de construction automobile, basée aux Etats Unis à Détroit dans le Michigan. Elle fut fondée par William Crapo Durant, le petit fils du gouverneur du Michigan de l’époque, le 16 septembre 1908.
En 1961 le premier robot de l’entreprise Unimation : Unimate fut embarqué de Danbury dans le Connecticut, puis mis en application dans une des usines de General Motors se situant à Parkway Avenue dans la banlieue de Trenton. Ce robot grâce à son bras articulé de 1,5 tonnes était capable de manipuler des pièces de fonderie pesant 150 kg.
En 1966 Unimation continue de développer des robots et élaborent notamment des robots permettant de faire d’autres tâches, comme des robots de manipulation matérielle ou encore des robots conçus pour la soudure ou pour d’autres applications de ce genre.
La robotique eu un grand succès au niveau industriel, son taux de production était tellement élevé qu’il apportait des bénéfices incroyables. En 1978 un nouveau robot est conçu par Unimation Inc avec la précieuse aide de General Motors. Ensemble ils conçurent le robot PUMA 500. Le robot PUMA (Programmable Universal Machine for Assembly) a été conçu par Vic Schienman et fut financé par General Motors et par The Massachussets Institute of Technology au milieu des années 70. Le robot est muni d’un bras manipulateur permettant d’assembler des composants industriels. Les robots PUMA vont être les robots les plus répandus dans les universités et vont être les robots d’assemblage les plus utilisés dans l’industrie.
GENERAL MOTORS eu une grande influence sur ses concurrents car quelques années plus tard les autres industries d’autres pays vont copier cette idée et vont même jusqu'à créer une association de la robotique au niveau national. C’est le cas du japon qui eu son association de la robotique industrielle (JIRA) en 1971, tandis que les Etat-Unis fondent leur association de la robotique industrielle en 1975.
En 1973, on pouvait recenser 71 entreprises qui développaient des robots. En 1974, Joe Engelberger avait fait des prévisions indiquant que l'industrie de la robotique représenterait pour 1990 un chiffre d'affaire annuelle de 3 milliards de dollars. Sa prévision était correcte, l'industrie valait effectivement 3 milliards de dollars en 1990, mais il n'avait pas prévu qu'elle serait contrôlée à 70 % par le Japon.
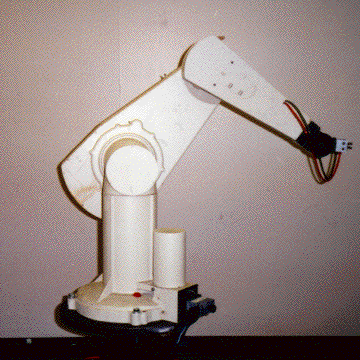
Le Robot PUMA
Le robot PUMA est un robot conçu par l’entreprise UNIMATION et par General Motors. Ce robot est un robot d’assemblage et c’est le robot d’assemblage le plus rependu dans l’industrie des années 70.
Le système de ce robot est composé de deux parties différentes :
-
Le robot ou bras manipulateur
-
Et son ordinateur de commande
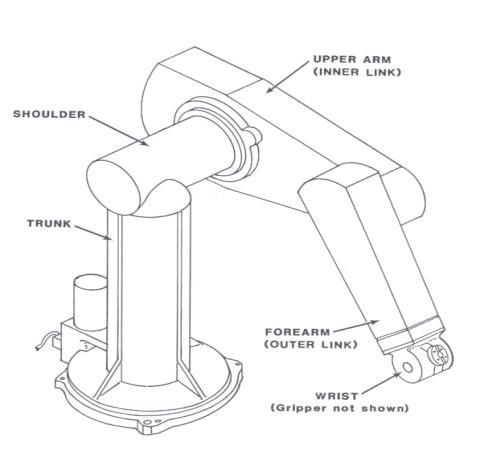
Le bras manipulateur
 Le bras manipulateur est le composant mécanique du système et comporte 6 axes de rotation, chacun de ces axes sont contrôlés par un servomoteur a courant continu.
Le bras manipulateur est le composant mécanique du système et comporte 6 axes de rotation, chacun de ces axes sont contrôlés par un servomoteur a courant continu.
Un servomoteur est un système motorisé capable d’atteindre des positions prédéterminée puis de les maintenir. Dans le cas du robot PUMA, il est capable d’atteindre des positions d’angles.
Toutes les parties du bras manipulateur sont connectées entre eux grâce à des articulations.
Le robot possède aussi des réducteurs permettant de contrôler le rapport de vitesse et le couple entre l’axe d’entrée et l’axe de sortie du mécanisme.
La rotation des articulations du bras manipulateur est effectuée grâce à l’action du servomoteur à courant continu et à l’aimant permanent, par l’intermédiaire d’un réducteur. Chaque moteur du bras articulé est associé à un codeur incrémental et à un potentiomètre.
Le codeur incrémental est un type de codeur rotatif qui permet de donner des informations précises sur le déplacement du bras articulé, grâce à un système de traitement. Et le potentiomètre est un type de résistance variable dont la valeur peut varier.
Le bon fonctionnement du bras articulé nécessite un contrôle de la position et de la vitesse de rotation de chaque articulation du robot.
Les changements de position de chaque membres articulés sont fournis grâce aux codeurs, alors que l’information de la vitesse de rotation est calculée par l’ordinateur du robot.
Les servomoteurs des trois axes principaux (axe 1, 2 et 3) sont équipés de freins électromagnétiques. Ces freins sont activés lorsque l’alimentation des ces moteurs est coupée, et maintiennent le bras articulé en position fixe. Ceci est une sécurité destinée à éviter les risques de blessures ou de casse sur le robot lorsque l’alimentation est coupée accidentellement (coupure de courant …)
L’ordinateur de contrôle

Le contrôleur est le composant électrique du système. Toutes les informations venant et allant vers les différents actionneurs du robot sont traitées par le contrôleur qui calcule en temps réel les ordres de commande. Les commandes manuelles donc tout ce qui est boutons et voyants sont situées sur la face avant du contrôleur. Et sur la face arrière du contrôleur on peut trouver les connections pour le bras manipulateur, le terminal (clavier + écran) et le lecteur de disquettes.
Le logiciel de programmation est enregistré dans la mémoire centrale de l’ordinateur. Ce logiciel permet d’interpréter les instructions de commande et le contrôleur transmet ces instructions de la mémoire centrale vers les différents actionneurs du robot. Grâce aux codeurs incrémentaux et aux potentiomètres, le contrôleur reçoit des informations de position pour chacun des axes. Ceci permet un control en boucle fermée des mouvements du robot. Et il y’a un lecteur de disquettes pour les enregistrements des programmes.
L’ordinateur de contrôle est équipé d’une télécommande qui peut être utilisée pour positionner manuellement le robot, en contrôlant directement les articulations.
Plusieurs modes de contrôle sont disponibles depuis la télécommande :
- On peut effectuer des positions spécifiques du bras manipulateur enregistrées dans la mémoire centrale par l’intermédiaire d’un appui sur le bouton « RECORD » de la télécommande.
- Ou alors contrôler manuellement le robot grâce à la télécommande.
Dans les deux modes de contrôle, deux systèmes d’axes peuvent être choisis :
-
Le système d’axe central ou World Mode (les trois axes de ce repère sont représentés sur la figure ci-dessous)
 World Mode
World Mode
-
Le système d’axe outil ou Tool Mode
Les axes de référence pour ce mode sont alignés avec le plan de montage de l'outil, avec leurs origines au centre de la semelle de montage de l'outil.
Les trois axes de ce repère sont représentés sur la figure suivante :

Tool Mode


